扫人类嗅觉盲区!机器人电子鼻已能嗅出生命、闻诊疾病|npj Robotics
你是否想过,机器人能闻到气味吗?
如今,随着电子鼻与机器人技术的深度融合,机器嗅觉正从实验室走向现实战场,成为机器人感知世界的新维度。
近日,香港科技大学研究团队在Nature旗下期刊《npj Robotics》发表重磅综述,系统梳理了电子鼻在机器人嗅觉领域的最新进展,揭示出这项技术如何赋予机器人嗅觉,使其在搜救、医疗、环境监测乃至家庭服务中发挥不可替代的作用。
▍为什么机器人需要嗅觉?
嗅觉可能是生物体最古老的感觉之一,但也是最精密的化学检测系统。人类鼻子中大约有400种不同类型的嗅觉受体,通过这些受体的不同组合,我们能够识别数千种不同的气味。
人类的嗅觉虽然敏锐,却存在本质局限。它是主观的,容易受生理和心理状态影响,且无法检测无味但有害的气体。
正因如此,开发能够复制甚至超越人类嗅觉能力的技术成为迫切需求。机器人嗅觉系统需要面对更严苛的挑战,要在湍流、风力变化和多种气味源的复杂环境中,仍然能够准确检测和识别目标气体。这种能力对于搜救、环境监测和医疗诊断至关重要。
如何实现这一目标?答案藏在电子鼻。这套系统的核心原理在于仿生:它效仿人类鼻子的工作逻辑捕捉气味,再通过一套复杂的智能算法扮演大脑的角色,对捕捉到的复杂化学信号进行解码与识别。
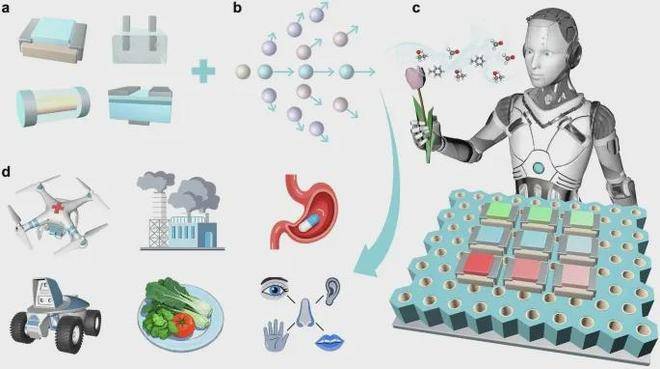
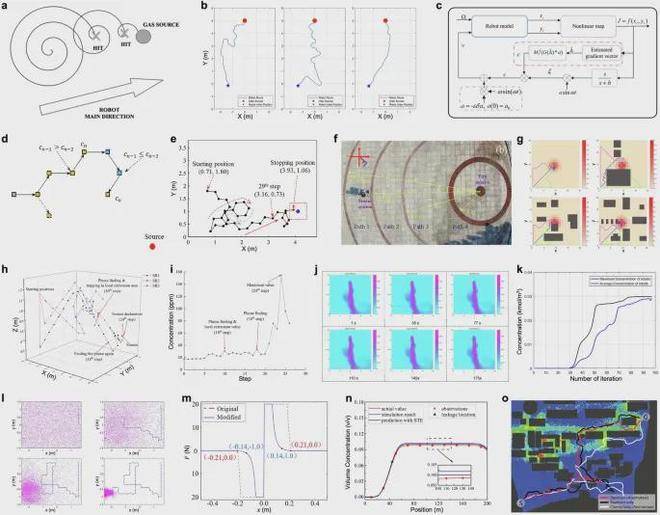
电子鼻在机器人领域的应用示意图。a四种气体传感器的示意图。b用于电子鼻解码的气体源定位算法示意图。c通过集成电子鼻在智能机器人中实现嗅觉功能。d机器人组装电子鼻的应用场景。
自1982年被首次提出以来,电子鼻已使用多种气体传感器,包括金属氧化物半导体、电化学、光学与场效应晶体管等,各有所长,适应不同场景需求。
▍四类嗅觉传感器搭载,各有绝活!
电子鼻是机器人嗅觉的核心技术,而传感器的多样性则是实现精准嗅觉的关键。机器人嗅觉技术的发展,依赖于四个主要传感器家族的进步。
金属氧化物半导体气体传感器机器人电子鼻的理想选择。其在灵敏度、成本效益和紧凑性方面表现出色,能够在保持轻巧和低功耗的同时,检测环境中极低浓度的目标气体,但其长期稳定性受材料性能漂移影响,存在嗅觉失灵的风险。
为提升可靠性,未来研究需聚焦于优化硬件设计,并结合自适应学习算法,以实现稳定持续的环境气味地图构建,从而降低系统维护频率。
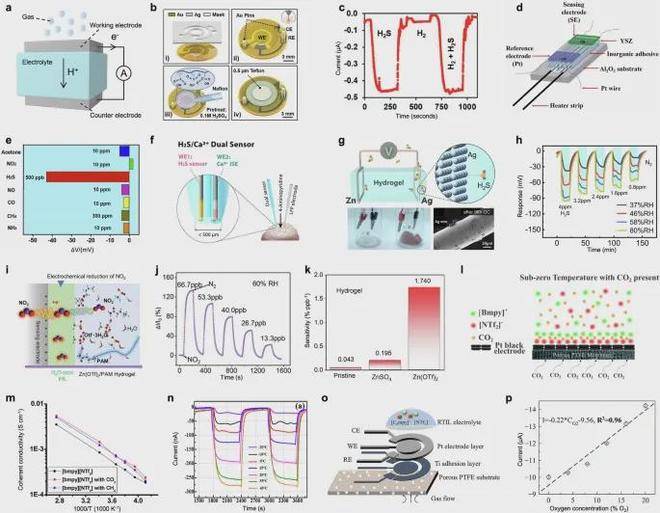 电化学气体传感器
电化学气体传感器
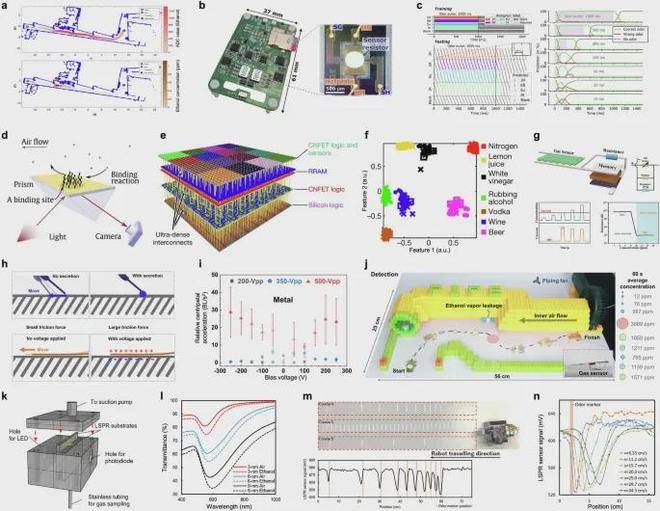
光学气体传感器以其高选择性、卓越的长期稳定性和抗环境干扰能力著称。其通过分析光与气体的相互作用进行检测,但传统系统往往体积较大。当前的研究正致力于通过超材料、MEMS工艺等实现传感器的小型化与集成化,并发展多气体同步检测能力,以使其能更灵活地部署于各类机器人平台。
 光学气体传感器
光学气体传感器
场效应晶体管传感器是朝着智能嗅觉迈进的关键。它本质上是颗可微型化的电子嗅觉芯片,灵敏度极高,且能与机器人计算核心无缝集成。新兴的二维材料让它如虎添翼。它的终极梦想不仅是检测气体,更是理解气味。
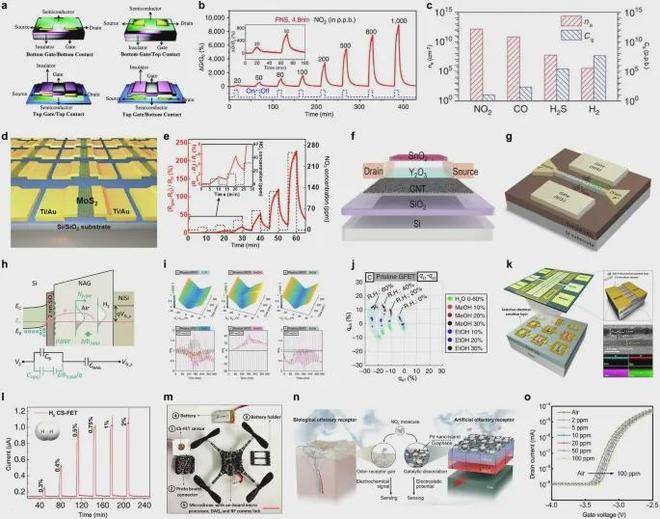 场效应晶体管气体传感器
场效应晶体管气体传感器
除此之外,还有依靠催化燃烧感知可燃气体的催化传感器,以及动态追踪气味的石英晶体微天平传感器,它们共同丰富了机器人鼻子的技能库。
▍气味从哪里来?聪明鼻子更需聪明大脑
拥有灵敏的鼻子只是第一步,如何让机器人理解并追踪气味才是真正挑战。
气味在空气中并非均匀散布,而是形成如同烟羽般飘忽不定的轨迹。面对这一难题,科学家从自然界寻找灵感,目前开发了多种气体源定位算法,可分为仿生方法、多机器人协作和贝叶斯概率策略三大类。
 机器人气体源定位算法
机器人气体源定位算法
仿生算法受飞蛾、大肠杆菌和涡虫等生物行为的启发。飞蛾利用螺旋形飞行模式追踪性信息素,这一策略已被转化为机器人搜索算法。在低气流环境下,研究人员发现六边形路径算法表现最佳,成功率达到73.3%。
这种算法的成功在于它能根据前两步测试的浓度调整前进方向,有效减少了浓度快速波动的影响。
多机器人协作方法显著提高了气体源定位的效率和可靠性。通过粒子群优化算法和蚁群优化算法的应用,机器人团队可以协同工作,共享信息,从而更有效地覆盖搜索区域并定位气味源。研究显示,在一定范围内增加机器人数量可以提高搜索成功率。
贝叶斯概率模型为机器人提供了推理能力。它们能够根据不完整的感官信息,结合对气体扩散规律的了解,推算出气味源最可能的位置。
未来趋势是混合算法,结合仿生策略的灵活性与概率模型的准确性,并融入实时学习与自适应机制,让机器人即使在湍流、多源干扰环境下也能高效定位。
▍从灾难现场到人体内部,机器人嗅觉的落地战场
这些技术未止步于实验室,配备电子鼻的机器人已经进入了多个关键领域,正在改变从灾难响应到医疗诊断以及家庭工作等多个领域的工作方式。
- 搜救行动:嗅出生命迹象
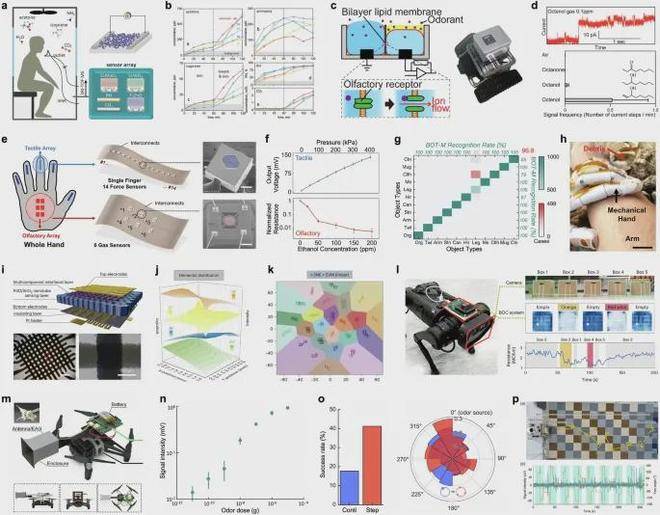
在地震、火灾等灾难现场,机器人可凭借电子鼻检测人体释放气味,定位被困者位置,避免救援人员二次伤亡。目前已出现集成触觉与嗅觉的仿生手掌机器人,能在废墟中识别人体并评估生命状态。
- 环境监测:实时嗅探污染源
搭载电子鼻的无人机、地面机器人可绘制气体分布三维地图,实时监测工厂泄漏、空气污染、火灾初期烟雾等,实现预警与溯源。
- 医疗健康:从穿戴到植入
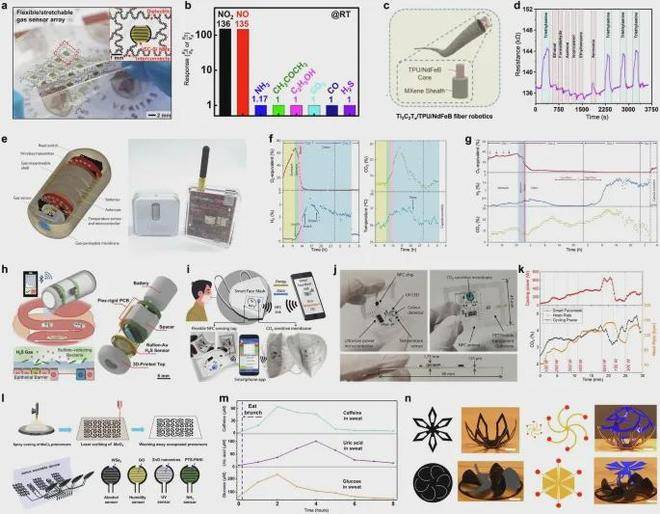
运用到穿戴式设备上,智能口罩集成CO₂传感器,实时监测呼吸状态;电子皮肤结合气体传感器,实现汗液成分无线监测;微型电子鼻胶囊可进入消化道,检测肠道气体,为胃肠疾病提供无创诊断新手段;在肿瘤切除等手术中,机器人嗅觉可实时识别组织挥发性标志物,辅助医生判断边界。
- 家用机器人:让家庭管家更懂你
未来的人形家庭机器人若搭载电子鼻,将能实时监测燃气泄漏、甲醛超标等危险;识别食物腐败,提醒用户及时处理;感知烹饪气味、空气清新度,自动调节家居环境;甚至通过识别主人喜爱的气味,提供个性化服务。
▍挑战与未来:机器嗅觉的下一次跃迁
尽管进展令人振奋,但机器人嗅觉技术仍面临诸多挑战。传感器的灵敏度、选择性、稳定性之间似乎存在天然的矛盾,就像不可能同时达到的铁三角。
复杂的真实环境更是无情。温度变化、湿度干扰、多重气味混合、传感器老化漂移......每一个因素都可能让精心设计的系统失灵。
未来的突破将来自多学科的深度交融。纳米材料科学有望创造出更高效的气体敏感材料;神经形态计算将模仿生物嗅觉系统的信息处理方式;柔性电子技术将使传感器像皮肤一样贴合各种表面。
或许在不久的将来,每一台服务机器人都会标配电子鼻,能够嗅出食物的新鲜度、空气中的有害物质,甚至主人身体的微妙变化。
那时,嗅觉将不再是生物独有的神秘感官,而成为机器感知世界的标准配置之一。
论文地址:http://www.nature.sh.sjuku.top/articles/s44182-025-00071-y