原创 哈工大团队创新电感辨识法,提升永磁同步电机控制精度
电动汽车或工业机器人中的电机,是如何实现精准调速和高效运行的?这背后离不开一种叫做“永磁同步电机”的核心部件。它凭借功率密度高、响应速度快等优点,成为许多高性能驱动系统的首选。但要充分发挥它的潜力,控制系统必须实时掌握一个关键参数——电感。

电感就像电机的“心跳”,能反映其内部磁场状态,直接影响控制精度。然而,电感的数值并不是固定的,它会随着电机负载和运行状态的变化而改变。因此,在线实时辨识电感,成为提升电机性能的重要一环。
传统方法大多依赖电机的转子位置信息来推算电感。但在一些实际应用中,比如无位置传感器控制,或是位置传感器本身存在偏差时,转子位置的测量并不完全准确。这就导致传统辨识方法的精度大打折扣,进而影响整个控制系统的表现,造成效率下降或响应迟缓。
针对这一难题,哈尔滨工业大学王奇维、李斌兴等研究人员提出了一种全新的思路:不再依赖转子位置,而是通过构建一个“虚拟轴系”的阻抗模型,结合高频信号注入,直接在线辨识电感。
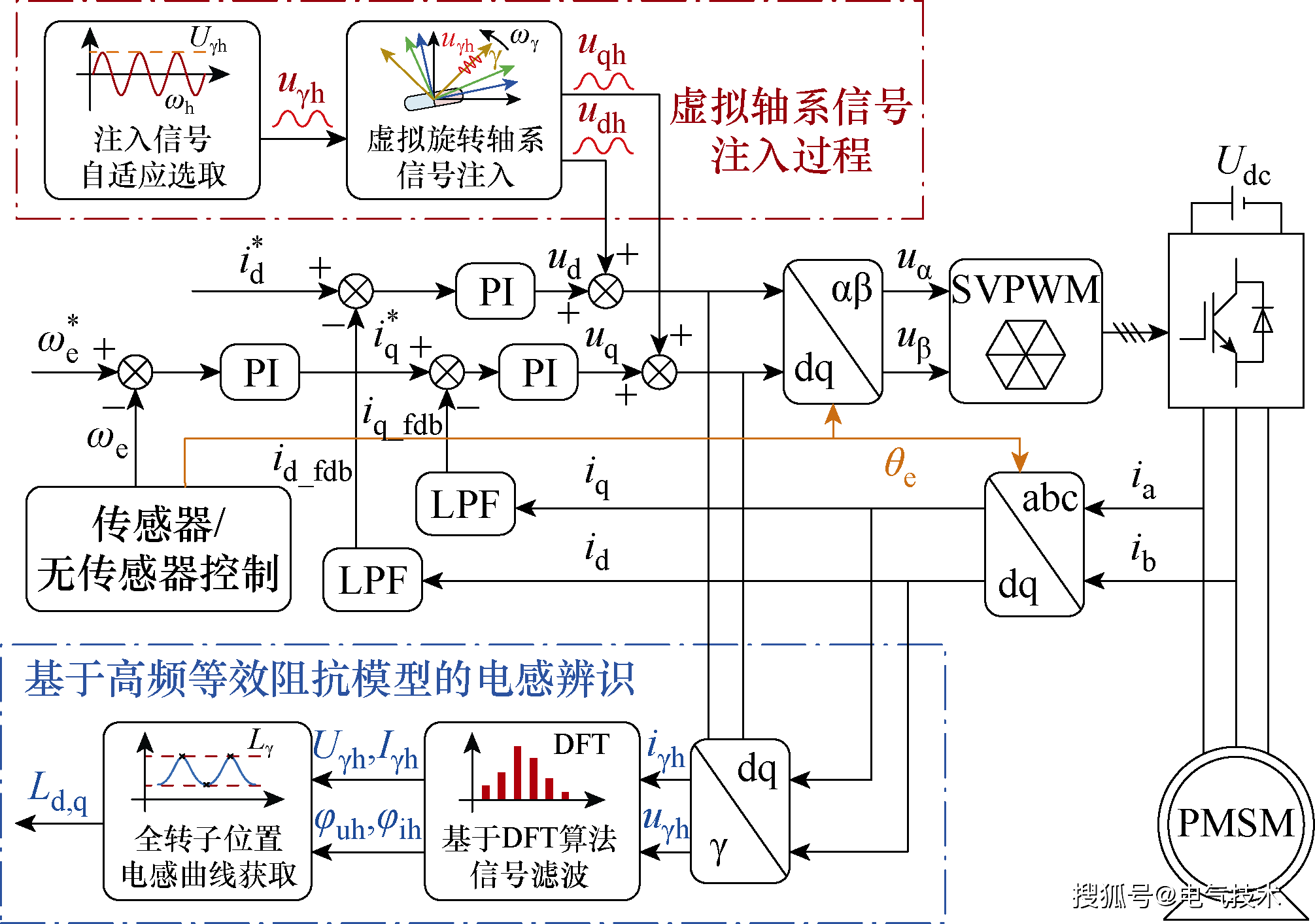 图1 基于虚拟轴系高频注入的电感辨识方法框图
图1 基于虚拟轴系高频注入的电感辨识方法框图
那么,这套方法是如何实现“无视”位置误差的呢?
简单来说,研究人员发现,电机在不同转子位置下的电感变化其实存在某种规律。他们据此建立了一套虚拟的坐标系模型,将高频正弦信号注入电机。通过分析电机对这个信号的响应——也就是其阻抗特性——就能反推出真实的电感值,而无需知道转子实际转到了哪里。
 图2 PMSM驱动系统实验验证平台示意图
图2 PMSM驱动系统实验验证平台示意图
这就好比在不清楚一个人具体面向何方时,通过测量他对不同方向声音的反应,依然能判断出他的听力特性。这种方法巧妙地将电感辨识与转子位置解耦,从根源上避免了位置误差带来的干扰。
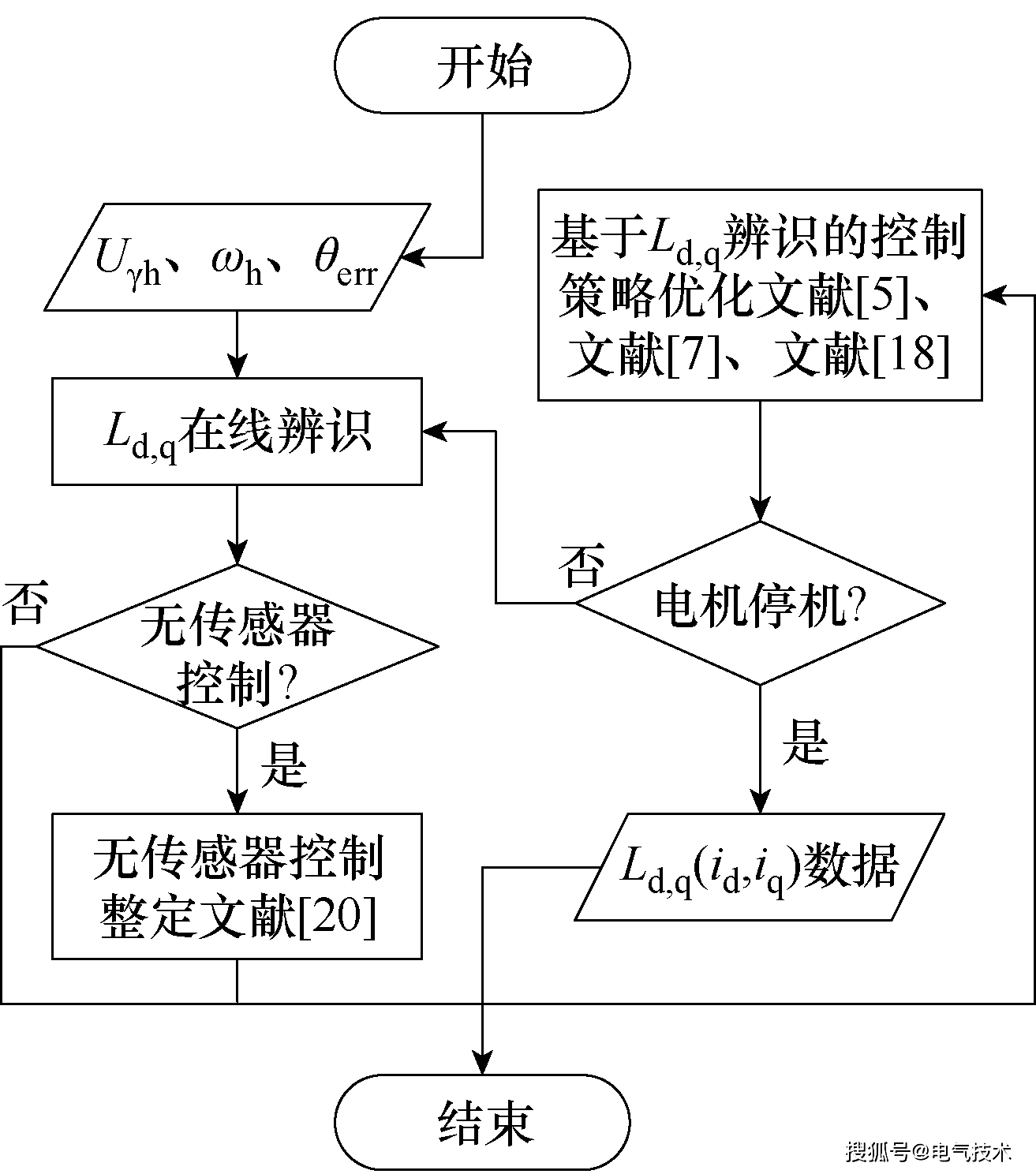 图3 电感辨识方法在PMSM控制中的应用流程
图3 电感辨识方法在PMSM控制中的应用流程
为了确保方法在不同转速、负载下的适用性,团队还深入研究了虚拟轴系的构建方式,以及注入信号的频率和幅值选择。通过调整虚拟坐标系的旋转速度,可以适配电机各种工况;合理设置信号参数,则能最大限度减少对电机正常运行的干扰,同时避免谐波影响辨识精度。
最终,这套方法在一台2.2 kW的永磁同步电机实验平台上得到了验证。结果表明,即使在转子位置存在误差的情况下,系统仍能稳定、准确地识别出电感参数。这不仅为电机控制算法提供了更可靠的数据支持,也提升了系统在复杂应用中的适应能力。
展望未来,这种不依赖位置信息的电感辨识方法,有望在电动汽车、工业伺服、航空航天等对控制精度和可靠性要求极高的领域发挥重要作用。
本工作成果发表在2025年第2期《电工技术学报》,论文标题为“基于转子位置误差解耦阻抗建模的永磁同步电机电感在线辨识方法”。本课题得到国家自然科学基金青年科学基金、台达电力电子科教发展计划科研项目和黑龙江省博士后项目的支持。